تصور کنید رباتی دارید که وظیفه دارد از یک نقطه به نقطه دیگر منتقل شود؛ با وجود سادگی این کار برای انسان، اکثر ماشینها در ابتدا هیچ حس یا درک ذاتی از محیط اطراف خود ندارند. طبق یک راهنمای فنی که در ۱ جولای ۲۰۲۶ در وبسایت dev.to منتشر شده است، دستیابی به یک مسیریابی قابل اعتماد نیازمند حل دو پرسش مجزا و بنیادین است: «من در حال حاضر کجای محیط هستم؟» و «چگونه میتوانم به هدفم برسم؟»
برای یک انسان، پاسخ به این دو سوال کاملاً بصری و بدیهی است. یک فرد وارد اتاقی میشود و فوراً متوجه میشود که تقریباً در کجاست. اما برای یک ماشین، هر حرکت یک محاسبه ریاضی پیچیده بر اساس دادههای خام حسگرها است. ربات در این وضعیت شبیه به مسافری است که چشمبند زده و باید ابتدا با تکیه بر حس لامسه و صدا، یک نقشه ذهنی از محیط بسازد تا بتواند تصمیم بگیرد کدام طرف قدم بردارد. این فرآیند، اعداد خشک و خام حسگرها را به سه خروجی تبدیل میکند: تخمینی از موقعیت فعلی، مدلی از محیط اطراف و در نهایت یک برنامه عملیاتی و concrete برای حرکت.
چالش مسیریابی
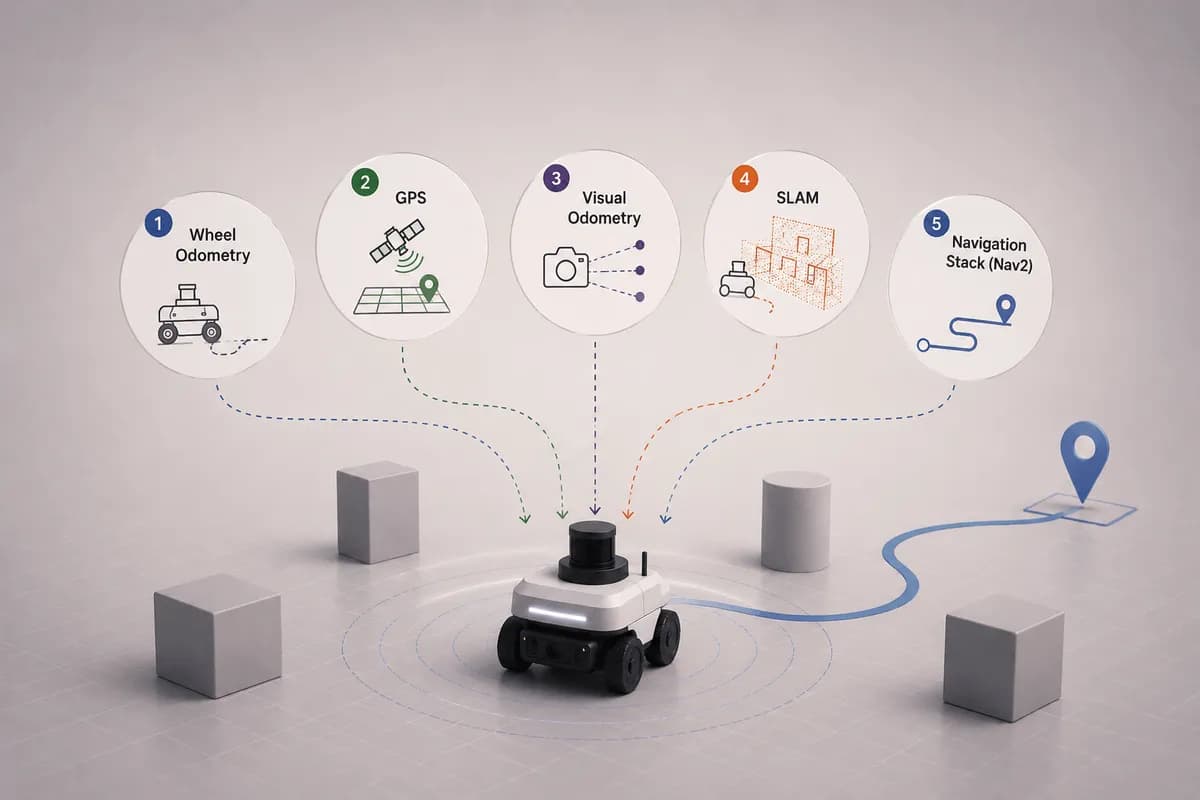
مسیریابی برای رباتها دشوار است زیرا آنها بهصورت پیشفرض فاقد آگاهی مکانی (Spatial Awareness) هستند. آنها باید بتوانند خوانشهای حسگرهای خود را به یک سیستم سهبخشی تبدیل کنند: نخست، تخمینی از موقعیت خود، دوم، یک مدل مکانی از محیط اطراف و سوم، یک برنامه حرکتی. هر روشی که برای حل این چالش به کار گرفته شود، با سبک خاصی از سبکسنگین کردن مزایا و معایب (Trade-off) همراه است.
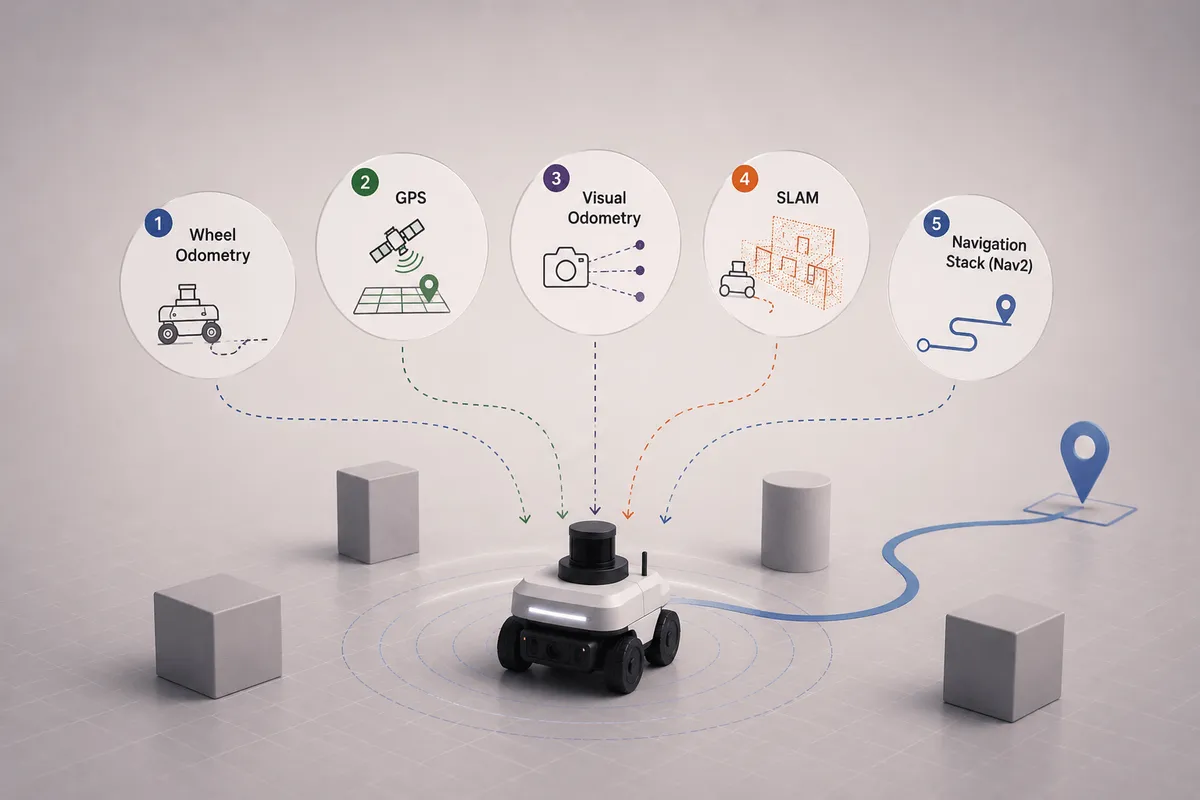
رباتها معمولاً بر پنج مکانیزم اصلی تکیه میکنند که هر یک دارای نقاط قوت خاص و نقاط ضعف مهلک هستند:
۱. اودومتری چرخ (Wheel Odometry)
این روش مسافت طی شده را از طریق اندازهگیری میزان چرخش چرخها تخمین میزند.
- سازوکار: این سیستم تعداد دورهای چرخش چرخها را ردیابی میکند تا تخمین بزند ربات چقدر جابهجا شده و موقعیتش در مختصات محیطی چه تغییری کرده است.
- مزایا: این متد ساده است، هزینه کمی دارد و برای پیمایش در مسافتهای کوتاه بسیار مؤثر عمل میکند.
- معایب: این روش از مشکل «رانش» یا Drift رنج میبرد. اگر چرخها حتی به مقدار بسیار کمی لیز بخورند، خطاهای کوچک در طول زمان روی هم جمع میشوند و در نتیجه، موقعیت ادراکشده توسط ربات بهمرور از واقعیت فاصله میگیرد.
۲. سامانه موقعیتیاب جهانی (GPS)
جیپیاس برای پهپادها، رباتهای تحویل کالا و خودروهای خودران ایدهآل است و یک موقعیت مطلق را در فضای باز فراهم میکند.
- سازوکار: بهجای تخمین زدن مسیر، GPS یک مختصات ثابت و دقیق از موقعیت ربات در کره زمین ارائه میدهد.
- محدودیتها: این سیستم در محیطهای بسته (داخلی) و یا در نزدیکی ساختمانهای بلند، به شدت دچار اختلال شده یا کاملاً از کار میافتد.
- دقت: حتی در فضای باز، GPS بهتنهایی اغلب برای جابهجاییهای بسیار دقیق کافی نیست. به همین دلیل، معمولاً دادههای آن با حسگرهای دیگر ترکیب (Fuse) میشود تا قابلیت اطمینان و دقت سیستم افزایش یابد.
۳. اودومتری بصری (Visual Odometry)
در این روش، دوربینها جایگزینی برای ردیابی مکانیکی چرخها میشوند.
- سازوکار: اودومتری بصری ویژگیهای خاص (Features) محیط را از یک فریم تصویری به فریم بعدی ردیابی میکند. سپس با تحلیل میزان جابهجایی این ویژگیها در تصاویر، میزان حرکت خودِ ربات را تخمین میزند.
- کاربرد: این روش بهویژه برای پهپادها و رباتهایی که در مناطقی فعالیت میکنند که دسترسی به سیگنال GPS ندارند، بسیار مفید است.
- محدودیت: این متد بهتنهایی فقط حرکت را تخمین میزند و نمیتواند درک کامل و جامعی از ساختار محیط اطراف به ربات ارائه دهد.
۴. مکانیابی و نقشهبرداری همزمان (SLAM)
همانطور که در تحلیلهای قبلی ما درباره امنیت مدلهای بازمتن و زیرساختهای هوشمند اشاره کردیم، ابزارهای پیشرفته باید بتوانند با محیط تطبیق یابند. SLAM یکی از قدرتمندترین و پرکاربردترین تکنیکها در رباتیک متحرک است.
- سازوکار: در این وضعیت، ربات در حالی که در یک محیط ناشناخته در حال حرکت است، همزمان نقشهای از آن محیط میسازد و بهطور مستمر محاسبه میکند که در کجای آن نقشه قرار دارد.
- حسگرها: SLAM عموماً بر اساس دادههای دریافتی از دوربین یا لیدار (LiDAR) اجرا میشود. افزودن یک حسگر لیدار اغلب گام حیاتی و کلیدی است که قابلیتهای نقشهبرداری و مسیریابی پیشرفته را فعال میکند.
- تفاوت با اودومتری: در حالی که اودومتری صرفاً حرکت را تخمین میزند و اجازه میدهد خطاها انباشته شوند، SLAM یک نقشه میسازد تا بتواند موقعیت ربات را در مسافتهای طولانیتر اصلاح و تصحیح کند.
۵. پشتههای مسیریابی (Navigation Stacks)
ابزارهایی مانند Nav2 (که پشته مسیریابی برای ROS 2 است) مکانیابی را به حرکت واقعی و عملیاتی تبدیل میکنند.
- سازوکار: این چارچوبها پل ارتباطی میان «دانستن اینکه کجایید» و «واقعاً به آن نقطه رفتن» هستند.
- برنامهریزی مسیر: این سیستمها یک مسیر مشخص و بهینه تا هدف طراحی کرده و بهطور فعال از موانع موجود در مسیر اجتناب میکنند.
- بهروزرسانی پویا: Nav2 مسیر را بر اساس تغییرات لحظهای و بلادرنگ محیط بهطور مداوم بهروزرسانی میکند تا از برخورد یا توقف جلوگیری شود.
رباتهای مدرن بهندرت از تنها یک روش استفاده میکنند. یک ربات متحرک پیچیده ممکن است اودومتری چرخ را با یک لیدار که در حال اجرای SLAM است ترکیب کند، از GPS برای اصلاحات موقعیتی در فضای باز بهره ببرد و در نهایت تمام این مختصات را به Nav2 بسپارد تا برنامهریزی مسیر انجام شود. در واقع، هر روش نقاط کور روش دیگر را میپوشاند.
برای یک توسعهدهنده یا علاقهمند، این بدان معناست که انتخاب سختافزار — بهویژه افزودن حسگر لیدار — تعیینکننده اصلی برای باز کردن قفل قابلیتهای پیشرفته نقشهبرداری است. بدون حسگر مناسب، ربات به تخمینهای ساده محدود میماند؛ اما با تجهیزات درست، میتواند به استقلال واقعی (Autonomy) برسد.
در نهایت، تفاوت میان «دانستن اینکه کجایید» و «دانستن اینکه چگونه به مقصد برسید»، مرز بین مکانیابی (Localization) ساده و مسیریابی (Navigation) واقعی است. مسیریابی قابل اعتماد تنها از طریق ترکیب حسگری، نقشهبرداری، مکانیابی و برنامهریزی در قالب یک سیستم یکپارچه حاصل میشود.
برای شروع پیادهسازی این سیستمها، توسعهدهندگان باید اکوسیستم ROS 2 را بررسی کنند. ابزارهایی مانند Drift میتوانند زیربنای شبیهسازی — شامل دنیای شبیهشده، توصیفات ربات و حسگرهایی مانند لیدار — را ایجاد کنند. این زیرساخت اجازه میدهد تا پشتههای مسیریابی مانند Nav2 بر روی آن اجرا شده و عملیات نقشهبرداری و برنامهریزی مسیر را به انجام برسانند.
گام بعدی شما
- مطالعه عمیق اکوسیستم ROS 2 برای پیادهسازی عملی سیستمهای مسیریابی.
- بررسی ابزار Drift برای ساخت شبیهسازهای محیطی، تعریف دقیق مدل ربات و تست عملکرد حسگرهای لیدار.
- آزمایش پشته Nav2 برای تبدیل نقشههای استخراج شده از SLAM به مسیرهای حرکتی عملیاتی و بدون برخورد.
اما داستان سختافزاری این تحول حتی شگفتانگیزتر است — به تحلیل ما درباره تراشههای تخصصی پردازش لبه مراجعه کنید.



گفتگو