
اگر امروز در حال ساخت عاملهای فیزیکی هستید، احتمالاً با زنجیرهای از ابزارهای پراکنده دستوپنجه نرم میکنید که در آن ضبط، آموزش و استقرار هر کدام نیاز به نرمافزارهای متفاوتی دارند. در ۱۷ ژوئن ۲۰۲۶، شرکت AWS کیت توسعه نرمافزاری (SDK) Strands Robots را عرضه کرد تا با تبدیل استک LeRobot به مجموعهای از ابزارهای ترکیبپذیر، این اصطکاک را بهطور کامل حذف کند.
این ادغام در زمانی اتفاق میافتد که صنعت به سمت خطلولههای «شبیهسازی به واقعیت» (Sim-to-Real) حرکت میکند. برای درک این موضوع، تصور کنید میخواهید رانندگی را به یک هوش مصنوعی یاد بدهید؛ بهجای اینکه ابتدا او را در یک بازی کامپیوتری (شبیهساز) آموزش دهید و بعد ناگهان پشت فرمان یک ماشین واقعی بنشانید، حالا سیستمی دارید که هر دو محیط را دقیقاً یکسان میبیند.
همانطور که در تحلیلهای قبلی ما دربارهی امنیت مدلهای بازمتن اشاره کردیم، یکپارچگی دادهها کلید کاهش خطاهای بحرانی است. Strands Robots این مشکل را با استفاده از کلاس مشترک DatasetRecorder حل کرده است. طبق مستندات فنی، این یعنی دادهای که در شبیهساز MuJoCo ثبت میشود، از نظر ساختاری با دادههای recorded شده روی بازوی فیزیکی SO-101 هیچ تفاوتی ندارد.
به نقل از راهنمای فنی huggingface.co، جریان کاری اکنون تنها در چند خط کد پایتون خلاصه میشود. قابلیتهای کلیدی این SDK عبارتند از:
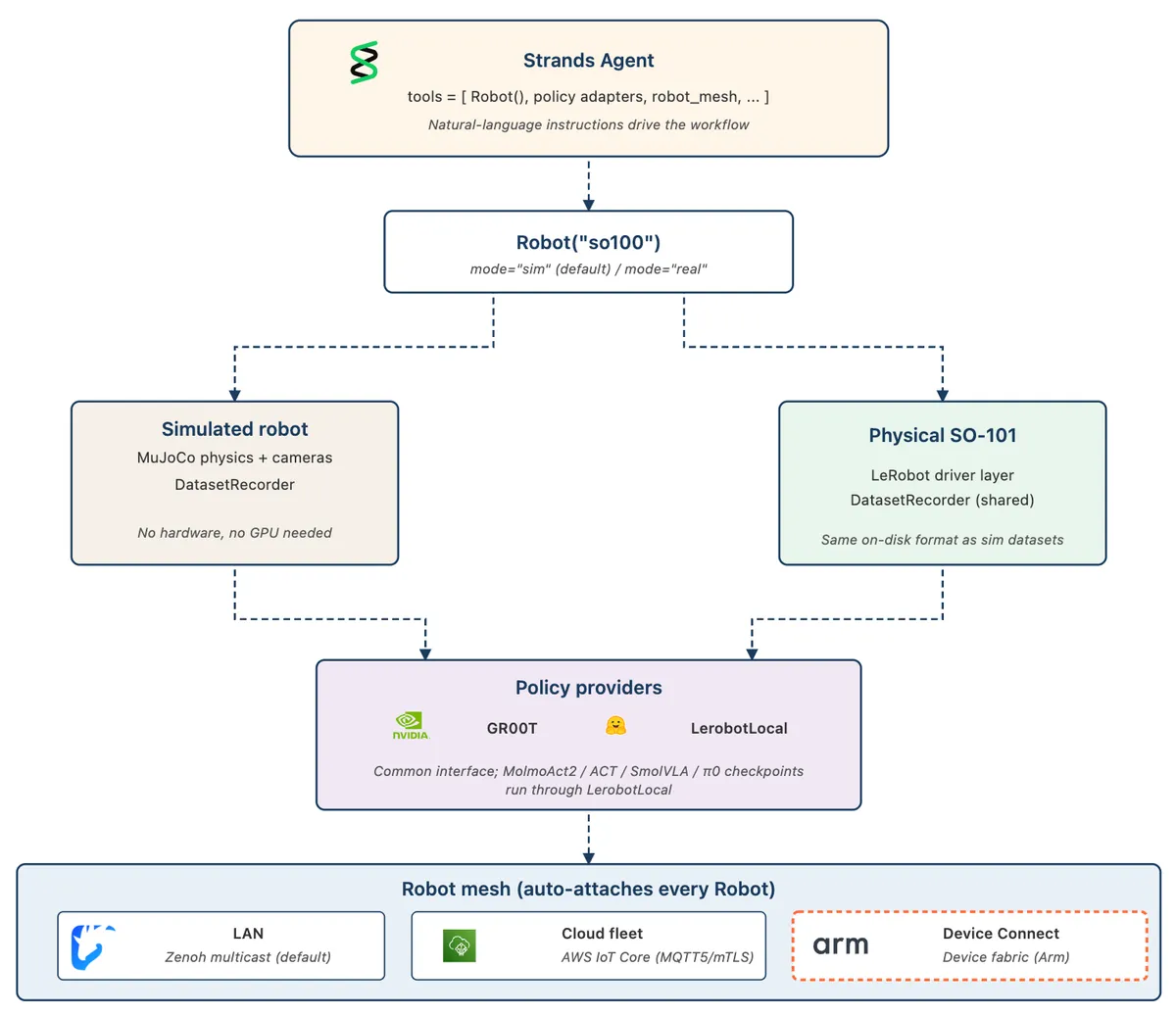
- رابط یکپارچه: دستور
Robot("so100")بهصورت پیشفرض روی شبیهساز اجرا میشود، اما با تغییر یک آرگومان بهmode="real"مستقیماً به سختافزار متصل میگردد. - تنوع در سیاستها: پشتیبانی از GR00T (از طریق کانتینرهای داکر)، LerobotLocal برای استنتاج (Inference) — که شبیه لحظهی آشپزی واقعی است، نه دورهی آموزش آشپز — و نقاط بازرسی MolmoAct2.
- هماهنگی ناوگان: استفاده از پروتکل Zenoh برای ارسال همزمان دستورات به چندین ربات بدون نیاز به مدیریت دستی آدرسهای IP. این رویکرد در راستای تلاشهای گستردهتر برای استانداردسازی نظارت بر مدلهای هوش مصنوعی در Physical AI است تا مدیریت ناوگان رباتیک قابل پیشبینیتر شود.
برای توسعهدهندگان، این بدان معناست که مرز بین شبیهسازی و استقرار فیزیکی دیگر یک مانع معماری نیست و تنها یک جزئیات در تنظیمات است. با استفاده از Hub به عنوان مخزن مرکزی، هر مجموعهداده در Hugging Face را میتوان فوراً برای تنظیم دقیق (Fine-tuning) — که مثل دادن تخصص پوست به یک پزشک عمومی است — به کار گرفت. همچنین، افزودن توقفات انسانی (HITL) برای اقدامات حیاتی مثل emergency_stop از آسیبهای فیزیکی ناشی از تزریق پرامپت (Prompt Injection) در محیط تولید جلوگیری میکند.

گام بعدی شما
- مخزن
strands-labs/robotsرا کلون کنید. - نمونه کد
hub_to_hardware.pyرا ابتدا روی لپتاپ و در محیط شبیهساز تست کنید. - پس از تایید منطق کد، آن را به بازوی فیزیکی متصل کرده و حالت
mode="real"را فعال کنید.
اما داستان سختافزاری این تحول حتی شگفتانگیزتر است؛ برای درک لایهی پردازشی این سیستمها به تحلیل ما دربارهی تراشههای Blackwell مراجعه کنید.



گفتگو